登錄
登錄
 注冊
注冊
多讀寫器環境下的RFID系統的抗干擾研究
1 多讀寫器環境下干擾的分類
近年來射頻識別( 1lD)系統在物流、超市、倉儲、門禁等很多領域得到了廣泛的應用。在實際的RFID系統中,常常會有多讀寫器環境(Multiple—Interrogator Envimnr~nt)是指在一個場景中,同時工作的讀寫器 的數量小于可能提供的最大信道數目,多讀寫器環境下的干擾問題也就是本文所要研究的重點。
多讀寫器環境下的干擾按照其產生的原因主要分為兩種,一種是讀寫器對讀寫器的干擾,另外一種是讀寫器對標簽的干擾 。
(1)讀寫器對讀寫器的干擾:如圖1所示,讀寫器R 工作時發出的射頻到達讀寫器R ,并對R 所讀寫的標簽T反射回來的信號形成了干擾。

(2)讀寫器對標簽的干擾:如圖2所示,標簽T同時在讀寫器R 1和R 2的讀寫區間內,當兩個讀寫器同時讀寫標簽T時會發生干擾,兩個讀寫器可能 都不能準確的瀆寫該標簽,該種情況類似于移動通信中的隱藏終端問題。
2 多讀寫器環境下干擾的解決方法
傳統的解決干擾的方法主要有三種:時分復用(TDMA),頻分復用(FDMA),碼分復用(CDMA)。 碼分復用要求電路上更為復雜的標簽電路,標簽的使用數量往往非常大,考慮到成本因素標簽電路應該盡量簡單,所以一一般不會采用碼分復用。頻分復用使用多個信道傳輸,一般讀寫器用的下行通路(從讀寫器到標簽)使用固定頻率,而上行通路(從標簽到讀寫器)采用不同的副載波頻率通信,頻分復用的缺點是讀寫器的成本較高,因為每一個信道都需要一個單獨的接收機。時分復用是把可使用的信道按 時間分配給各個讀寫器,這種技術構成了防碰撞算法最大的一族。
2.1 ETSI的Listen before talk
制定RFID歐洲標準的ErlSI提出了一種多讀寫器協同工作方法,叫做“先偵聽再通信”(1isten before talk),它的偵聽機制有點類似于以網中的CSMA技術,在一個讀寫器試圖和它周圍的標簽通信之前,讀寫器必須先確定它所使用的信道是空閑狀態的,確保信道為空閑之后,讀寫器才能發起對標簽的查詢, 否則必須等待信道空閑。“Listen before talk”方法可
以有效地解決讀寫器對讀寫器的干擾問題,但是對于讀寫器對標簽的干擾并沒有良好地解決,因為即使發現信道是空閑的,有可能發生類似于移動通信中的隱藏終端問題。
2.2 分時和色波算法相結合的方法
為了更加有效地解決讀寫器對標簽的干擾,本文提出了一種分時和色波算法相結合的整體干擾解決方案。采用分時對標簽和讀寫器的成本要求都不是很高,而實際應用場景中的讀寫器網絡拓撲變化較大,采用色波算法這樣一種分布式的在線算法,可以靈活有效地適應各種不同地應用場景。考慮到現實生活中RHD系統組網廣泛應用于倉儲管理,本文將采用倉庫作為目標場景,進行建模和算法仿真。
2.2.1 利用分時解決讀寫器對標簽的干擾
讀寫器對標簽的干擾,主要是因為相鄰的讀寫器讀寫范圍發生了交疊,而處于這部分相交的讀寫范圍內的標簽有可能同時被兩邊的讀寫器讀到,從而造成讀寫器對標簽的干擾。假設我們能夠得到工作區域內所有的讀寫器的位置分布,那么通過分組
規劃然后再對各組進行分時可以有效地避免讀寫器對標簽的干擾問題。
首先通過距離判斷,如果兩個讀寫器之間的距離小于他們的讀寫半徑之和,那么他們就可能產生讀寫器對標簽的干擾,解決這種類似隱藏終端問題的最好辦法是讓他們分時工作。按照這樣的原則,將所有的讀寫器分成J7v組(N≥2),因為不同組的
讀寫器工作在不同的time slot,這樣就最大程度的消除了同組中的讀寫器發生讀寫器對標簽的干擾的可能,分組時盡量使得同組內的讀寫器均勻分布在工作區域內,并且各組內的讀寫器數目近似相等。假設總的工作周期為 ,將 平均分成N個slot,每組 讀寫器都工作在其中的一個slot內。
2.2.2 利用色波算法解決同組內讀寫器對讀寫器的干擾
對于組內的多個讀寫器,雖然間隔較大,但是因為讀寫器的干擾范圍遠大于他的讀寫范圍,所以如果相鄰的讀寫器同時工作的話很有可能發生讀寫器對讀寫器的干擾,色波算法作為一種分布式的在線算法,不但容易實現,而且可以有效地減少讀寫器對讀寫器的干擾,在高節點傳輸概率的情況下,色波算法具有比其他退避算法更好的性能 ]。在色波算法中,用圖來表示讀寫器網絡,圖G=(V,E)是一對有限集合的組合,集合 是圖中所有端點的集合,集合E是圖中端點對的集合,端點 , 如果滿足(V1,V1 )∈ E,那么就說他們是相鄰的。使用色波算法對一個圖的著色就是給端點賦予不同的顏色號碼,盡量使得兩個相鄰端點的顏色沒有相同的,而每個端點都只能在其對應的顏色slot內通信。
3 仿真和結果
3.1 仿真場景設置
仿真的場景是一個大倉庫,里面整齊的排放著一列列貨架,倉庫的長寬為80m×40m,其中總共布置了78個讀寫器,每個讀寫器的讀寫半徑是4m,間隔是6m。所有讀寫器的總體讀寫范圍覆蓋了整個倉庫平面。仿真時隨機產生各節點的起始顏色號, 仿真過程中有4個參數:最大顏色數,傳輸概率,仿真周期和讀寫器掃描方式。最大顏色數范圍從3到l0,傳輸概率是指讀寫器和周圍的標簽通信的概率, 選取這樣的幾組數值:25%,50%,75%,仿真周期是 一個常數,表示仿真過程中讀寫器網絡的掃描總次數,讀寫器掃描方式共有兩種,分別為行掃描和列掃描。這樣仿真總共有8×3×2=48組。為了盡量減少不同的起始值對仿真結果的影響,仿真周期選取盡量大,本文把他選為100,000。仿真程序用C++編寫,程序運行的環境是Linux 2.6.11 i386 512M內存。仿真運行完成后觀察總的節點成功傳輸次數和總的節點失敗重傳次數,計算出重傳指數,重傳指數的定義如下:
重傳指數=節點重傳總數/(節點成功傳輸總數+ 節點重傳總數)
對讀寫器網絡進行掃描時,采取兩字順序進行掃描,行掃描和列掃描,分別計算兩種掃描方式下的重傳指數。
3.2 讀寫器分組
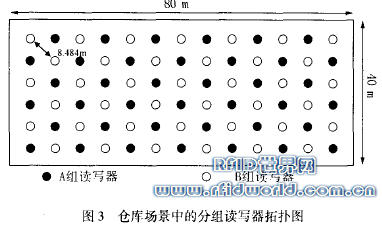
把所有的讀寫器分為兩組,每組39個,經過分組之后的讀寫器的拓撲圖如圖3。圖中A,B兩組的讀寫器數目相同,拓撲結構相似,相鄰節點的最小距離是8.484m,大于相鄰節點的讀寫距離之和4+4= 8m,滿足防止讀寫器對標簽干擾的距離要求。
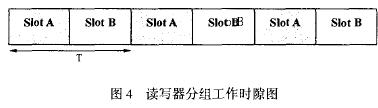
讓這兩組讀寫器分時工作,如圖4所示,假設工作周期是T ,把T分為兩個slot,兩組讀寫器分別工作在slot A和slot B。
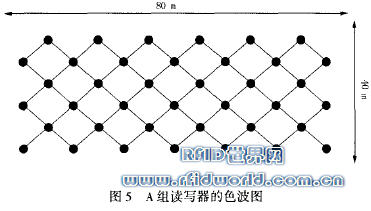
因為兩組讀寫器有著相同的拓撲,讀寫器數目也相等,所以在接下去的討論中,只需對其中任意的一組進行DCS色波算法的仿真,來觀察其性能。以 A組讀寫器為例,圖5是A組讀寫器的色波圖。
3.3 DCS色波算法仿真
本文使用的DCS色波算法主要包括三個子程序
子程序l一傳輸子程序main
如果有通信請求發生:
一如果(時序號%最大顏色號)==當前顏色號
那么傳輸開始
否則閑置直至(時序號%最大顏色號)
= = 當前顏色號
DCS子程序2一沖撞檢測子程序Collosion
如果試圖通信但是檢測發現有沖撞產生:
一當前顏色號=隨機產生的新的不同的顏色號
一將新產生的顏色號廣播給周圍的鄰居節點
DCS子程序3一“踢”子程序Kick:
如果鄰居節點收到包含顏色信息的kick信號
一隨機的改變至0一個新的不同顏色
3.4 仿真結果分析
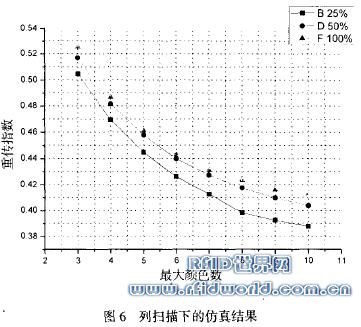
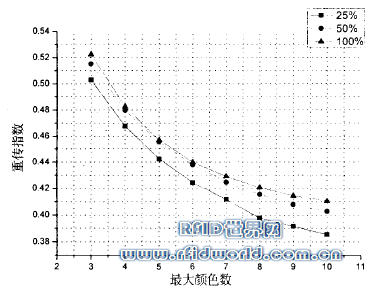
把8×3×2組仿真結果繪成曲線,按照掃描方式的不同繪成圖6,圖7。從圖6和圖7中可以看出,傳輸概率為75%的曲線總是在這三條曲線的最上方,傳輸概率為25%的曲線總是在最下方。這是 因為倉庫模型中讀寫器數量多,而且分布密集,當節點負載越重時,需要同時工作的相鄰節點數越多,網絡的重傳指數也就越高。對于兩種不同的掃描方式,仿真得到的結果也有所不同,因為倉庫區域是一個長方形平面,長寬比例為80:40,當采用行掃描(長邊掃描優先)時,讀寫器的重傳指數比采用列掃描(短邊掃描優先)略低,這是因為采用列掃描時,因為列掃描是短邊掃描優先,所以先掃描到的節點發送kick信號之后,可能在不久的將來又再接收到鄰近的后掃描到的節點發出的kick信號,造成一定程度的“顛簸”。
4 結束語
本文提出了一種結合分時和色波算法的RFID 多讀寫器環境下的抗干擾方案,全面地解決了RFID 多讀寫器環境中的讀寫器對讀寫器干擾和讀寫器對標簽干擾。采用分時算法不要求讀寫器· 采用多套接收機,也不要求標簽采用更為復雜的電路,相對于頻分復用和碼分復用實現的成本更低,是當前采用的最多的抗干擾手段。色波算法作為一種分布式的在線算法可以靈活有效地適應各種讀寫器拓撲網絡,兩者相結合可以有效地解決多讀寫器環境中的干擾問題。